Międzywydziałowe Studenckie Koło Naukowe Konstrukcji Maszyn to dynamicznie rozwijająca się grupa studentów pasjonujących się projektowaniem, analizą i wdrażaniem nowoczesnych rozwiązań inżynierskich. Naszym celem jest pogłębianie wiedzy technicznej oraz zdobywanie praktycznych umiejętności poprzez realizację ambitnych projektów. Obecnie głównym obszarem naszej działalności jest projekt manipulatora łazika marsjańskiego – zaawansowanego ramienia robotycznego, które stanowi kluczowy element większego przedsięwzięcia, jakim jest budowa łazika eksploracyjnego do misji marsjańskich. Manipulator odpowiadać będzie za wykonywanie precyzyjnych zadań takich jak pobieranie próbek gruntu, obsługa narzędzi badawczych czy interakcja z otoczeniem w trudnych warunkach pozaziemskich. Projekt realizowany jest z uwzględnieniem rzeczywistych wymagań misji kosmicznych – skupiamy się na takich aspektach jak lekkość konstrukcji, wytrzymałość materiałowa, dokładność ruchów, a także odporność na warunki ekstremalne.
Projekty:
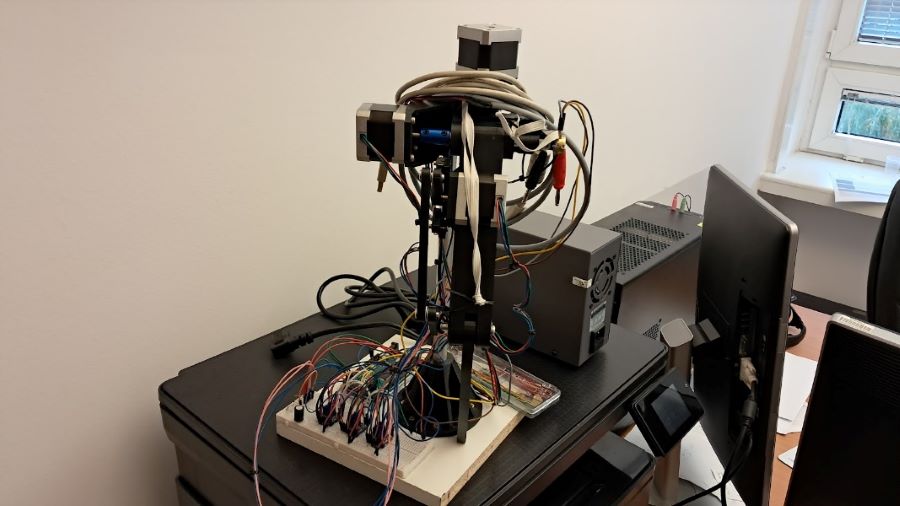
Prototyp nogi robota kroczącego: Prototyp nogi robota kroczącego to projekt mający na celu opracowanie mechanizmu kroczącego dla robotów mobilnych. Konstrukcja opiera się na wieloczłonowym układzie z napędem elektrycznym, sterowanym przez mikrokontroler. Elementy wykonano metodą druku 3D, a system wykorzystuje silniki krokowe i czujniki. Testy pozwoliły na optymalizację i poprawę wytrzymałości. Na podstawie dwóch konceptów konstrukcyjnych powstały dwa prototypy: jedna konstrukcja opierała się na serwomechanizmach, druga na silnikach krokowych. Nogi te zostały przyrównane sobie i poddane badaniom.
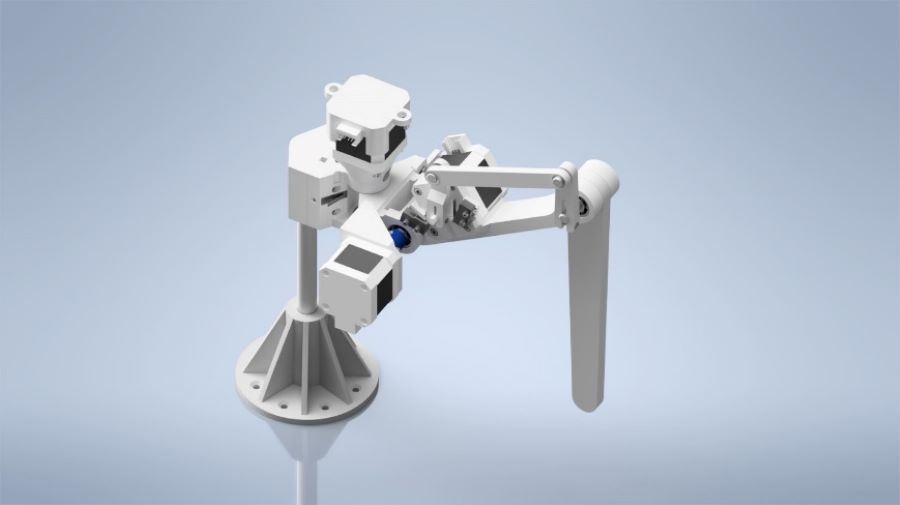
Manipulator łazika: Projekt manipulatora robota stanowi kluczowy element łazika marsjańskiego, umożliwiający wykonywanie precyzyjnych zadań w terenie. Ramię robota zostanie zaprojektowane z myślą o pobieraniu próbek gruntu, obsłudze narzędzi badawczych oraz manipulacji obiektami w wymagających warunkach środowiskowych. Konstrukcja manipulatora musi łączy lekkość, wytrzymałość i precyzję, a jego modułowa budowa pozwala na łatwą adaptację do różnych zastosowań. W projekcie wykorzystujemy nowoczesne rozwiązania z zakresu mechaniki, automatyki i druku 3D. Manipulator ten, wraz z prototypami nóg, jest częścią większego projektu, którym jest łazik marsjański.
Dane kontaktowe:
- Opiekun: dr inż. Jan Górecki, dr hab. inż. Łukasz Gierz
email: jan.gorecki@put.poznan.pl, lukasz.gierz@put.poznan.pl - Przewodniczący: Damian Jokiel
email: damian.jokiel@student.put.poznan.pl - Wiceprzewodniczący: Jan Płaszczyński
email: jan.plaszczynski@student.put.poznan.pl
LinkedIn: https://www.linkedin.com/posts/knkm_cze%C5%9B%C4%87-my-ju%C5%BC-po-dosik-dzi%C4%99kujemy-za-zainteresowanie-activity-7259645013356171266-Zb21?utm_source=share&utm_medium=member_desktop